

现代地质 ›› 2024, Vol. 38 ›› Issue (02): 464-476.DOI: 10.19657/j.geoscience.1000-8527.2023.101
王德富1( ), 李永鑫1,2(), 任娟3, 范亚军1, 刘立1,2, 罗超1
), 李永鑫1,2(), 任娟3, 范亚军1, 刘立1,2, 罗超1
收稿日期:2023-07-09
修回日期:2023-08-18
出版日期:2024-04-10
发布日期:2024-05-22
通讯作者:
李永鑫,男,高级工程师,1986年出生,地理信息系统专业,主要从事测绘遥感技术生产与管理研究。Email: 317307006@qq.com。
作者简介:王德富,男,工程师,1990年出生,地质学专业,主要从事水工环地质与遥感技术应用研究。Email: 497333919@qq.com。
基金资助:
WANG Defu1(), LI Yongxin1,2(), REN Juan3, FAN Yajun1, LIU Li1,2, LUO Chao1
Received:2023-07-09
Revised:2023-08-18
Online:2024-04-10
Published:2024-05-22
摘要:
高位和高隐蔽性滑坡调查人力难至、效率低下且安全风险大,利用无人机光学和机载LiDAR等航空遥感技术进行调查识别能够有效克服该问题,已成为当前研究应用的热点。目前多数研究与应用以宏观调查和解译为主,针对滑坡拉裂缝、滑坡壁等发育要素的精细化识别和量测研究较少。为进一步细化无人机光学和机载LiDAR识别的滑坡要素解译特征,提高该技术的综合应用效果,本文选取川西地震活跃区的汶川龙溪沟高位滑坡为示范,采用无人机摄影测量、机载LiDAR、解译对比与空间测量以及实地调查复核等方法,提取了28条拉张裂缝、2条剪切裂缝、8处下挫陡坎、2条滑坡壁、5条前缘边界、5个次级变形体,基于滑坡要素排列组合划分了2个次级滑体、4个变形区。野外验证结果与室内解译高度吻合,证明了该方法的可靠性和准确性。研究成果总结对比滑坡要素在不同数据上的色调、纹理、光谱差异,探索联合无人机光学与机载LiDAR的滑坡要素“色调-纹理-图谱”协同对比提取方法,阐述了高位滑坡“先解译要素再分区组合”的精细识别过程。研究成果可为其他高危高位滑坡的精细化识别研究及防治应用提供技术参考,具有应用推广价值。
中图分类号:
王德富, 李永鑫, 任娟, 范亚军, 刘立, 罗超. 联合无人机光学与机载LiDAR在高位滑坡要素识别中的应用:以川西汶川龙溪沟滑坡为例[J]. 现代地质, 2024, 38(02): 464-476.
WANG Defu, LI Yongxin, REN Juan, FAN Yajun, LIU Li, LUO Chao. Application of Joint UAV Optics and Airborne LiDAR in High Level Landslide Element Identification: A Case Study from the Longxigou Landslide in Wenchuan, Western Sichuan[J]. Geoscience, 2024, 38(02): 464-476.

图1 汶川龙溪沟地理位置及区域地层特征 (a) 地理位置图;(b) 地质构造图;(c) 地层岩性图;(d) 强变质千枚岩(2022-05-31拍摄);(e) 岩石风化面(2022-05-31拍摄); 1.第四系冲洪积物;2.第四系崩积物;3.第四系滑坡堆积物;4.第四系残坡积物;5.志留系茂县群第四组;6.志留系茂县群第三组;7.志留系茂县群第二组;8.志留系茂县群第一组;9.奥陶系;10.寒武系
Fig.1 Geographical location and stratigraphic lithological characteristics in the study area

图2 研究路线图
Fig.2 Flowchart showing the technical steps
| 调查 比例尺 | 航飞影像质量要求 | 机载LiDAR点云密度要求 | |||
|---|---|---|---|---|---|
| 地形 类别 | 影像 分辨率 (m) | 平面位 置中误 差(m) | 林分 郁闭度 | 点云密度 (点/m2) | |
| 1:5000 | 平原、丘陵 | 0.2 | 2.5 | [0.7,1] | [15,20) |
| 低山地 | 0.2 | 3.5 | [0.2,0.69) | [10,15) | |
| 中高山地 | 0.2 | 3.7 | [0,0.2) | [2,4) | |
表1 航飞影像质量与LiDAR点云密度要求
Table 1 Requirements for the aerial image quality and LiDAR point cloud density
| 调查 比例尺 | 航飞影像质量要求 | 机载LiDAR点云密度要求 | |||
|---|---|---|---|---|---|
| 地形 类别 | 影像 分辨率 (m) | 平面位 置中误 差(m) | 林分 郁闭度 | 点云密度 (点/m2) | |
| 1:5000 | 平原、丘陵 | 0.2 | 2.5 | [0.7,1] | [15,20) |
| 低山地 | 0.2 | 3.5 | [0.2,0.69) | [10,15) | |
| 中高山地 | 0.2 | 3.7 | [0,0.2) | [2,4) | |

图3 无人机光学滑坡解译标志 (a) 拉张裂缝;(b) 张性裂缝;(c) 纵向剪切裂缝;(d) 滑坡后壁;(e) 后缘洼地;(f) 新鲜滑塌
Fig.3 Unmanned aerial vehicle optical image landslide interpretation mark

图4 机载LiDAR滑坡解译标志 (a) 拉张裂缝;(b) 剪切裂缝;(c) 滑坡后壁;(d) 周缘边界;(e) 下挫台坎;(f) 次级变形体
Fig.4 Marks for the airborne LiDAR landslide interpretation

图5 滑坡要素解译图 (a) 无人机光学影像;(b) 机载LiDAR-DEM
Fig.5 Interpretation of the landslide elements
| 编号 | 经度 | 纬度 | 解译长 度(m) | 数据源 | 编号 | 经度 | 纬度 | 解译长度 (m) | 数据源 |
|---|---|---|---|---|---|---|---|---|---|
| LZLF-01 | 103°31'28.301″ | 31°33'33.949″ | 79.27 | UAV | LZLF-26 | 103°31'30.166″ | 31°33'32.218″ | 25.70 | UAV |
| LZLF-02 | 103°31'26.699″ | 31°33'31.648″ | 39.34 | UAV | LZLF-27 | 103°31'28.409″ | 31°33'32.072″ | 36.55 | UAV |
| LZLF-03 | 103°31'25.592″ | 31°33'28.118″ | 227.31 | UAV+LiDAR | LZLF-28 | 103°31'34.203″ | 31°33'28.988″ | 53.58 | UAV+LiDAR |
| LZLF-04 | 103°31'11.317″ | 31°33'20.577″ | 27.49 | UAV | JQLF-01 | 103°31'25.179″ | 31°33'27.065″ | 127.84 | UAV+LiDAR |
| LZLF-05 | 103°31'8.443″ | 31°33'19.543″ | 92.64 | UAV | JQLF-02 | 103°31'28.827″ | 31°33'31.336″ | 56.33 | UAV |
| LZLF-06 | 103°31'5.144″ | 31°33'19.638″ | 35.76 | UAV | XCDK-01 | 103°31'19.210″ | 31°33'28.953″ | 28.58 | LiDAR |
| LZLF-07 | 103°31'32.275″ | 31°33'28.104″ | 44.73 | UAV+LiDAR | XCDK-02 | 103°31'20.946″ | 31°33'25.098″ | 24.73 | LiDAR |
| LZLF-08 | 103°31'28.615″ | 31°33'26.308″ | 196.80 | UAV+LiDAR | XCDK-03 | 103°31'35.606″ | 31°33'21.720″ | 289.47 | LiDAR |
| LZLF-09 | 103°31'24.484″ | 31°33'23.036″ | 124.34 | UAV+LiDAR | XCDK-04 | 103°31'14.622″ | 31°33'16.148″ | 228.15 | LiDAR |
| LZLF-10 | 103°31'32.964″ | 31°33'27.661″ | 35.58 | UAV+LiDAR | XCDK-05 | 103°31'35.675″ | 31°33'35.322″ | 57.48 | UAV+LiDAR |
| LZLF-11 | 103°31'29.147″ | 31°33'27.998″ | 76.07 | UAV | XCDK-06 | 103°31'33.409″ | 31°33'36.425″ | 67.98 | UAV+LiDAR |
| LZLF-12 | 103°31'31.702″ | 31°33'28.441″ | 21.60 | UAV | XCDK-07 | 103°31'29.022″ | 31°33'36.919″ | 122.35 | UAV+LiDAR |
| LZLF-13 | 103°31'32.860″ | 31°33'24.858″ | 15.61 | UAV | XCDK-08 | 103°31'24.127″ | 31°33'31.968″ | 130.96 | UAV+LiDAR |
| LZLF-14 | 103°31'32.701″ | 31°33'24.564″ | 19.57 | UAV | HPB-01 | 103°31'33.636″ | 31°33'16.551″ | 1822.41 | LiDAR |
| LZLF-15 | 103°31'32.643″ | 31°33'24.433″ | 15.08 | UAV | HPB-02 | 103°31'25.368″ | 31°33'8.839″ | 1730.82 | LiDAR |
| LZLF-16 | 103°31'32.864″ | 31°33'25.359″ | 15.53 | UAV | QYDJ-01 | 103°31'30.643″ | 31°33'41.233″ | 328.10 | UAV+LiDAR |
| LZLF-17 | 103°31'32.400″ | 31°33'25.121″ | 14.87 | UAV | QYDJ-02 | 103°31'1.323″ | 31°33'24.602″ | 162.49 | UAV+LiDAR |
| LZLF-18 | 103°31'31.671″ | 31°33'24.773″ | 12.85 | UAV | QYDJ-03 | 103°31'8.743″ | 31°33'32.113″ | 339.34 | UAV+LiDAR |
| LZLF-19 | 103°31'31.252″ | 31°33'24.641″ | 6.77 | UAV | QYDJ-04 | 103°31'15.904″ | 31°33'35.455″ | 100.43 | UAV+LiDAR |
| LZLF-20 | 103°31'30.880″ | 31°33'24.687″ | 10.20 | UAV | QYDJ-05 | 103°31'19.188″ | 31°33'39.955″ | 292.20 | UAV+LiDAR |
| LZLF-21 | 103°31'18.898″ | 31°33'14.474″ | 218.83 | UAV+LiDAR | BXT-01 | 103°31'17.773″ | 31°33'26.923″ | 446.04 | LiDAR |
| LZLF-22 | 103°31'17.895″ | 31°33'23.470″ | 77.46 | LiDAR | BXT-02 | 103°31'11.288″ | 31°33'20.288″ | 661.71 | LiDAR |
| LZLF-23 | 103°31'18.842″ | 31°33'23.375″ | 38.43 | LiDAR | BXT-03 | 103°31'33.172″ | 31°33'34.402″ | 796.72 | UAV+LiDAR |
| LZLF-24 | 103°31'31.153″ | 31°33'31.655″ | 26.14 | UAV | BXT-04 | 103°31'24.471″ | 31°33'27.910″ | 830.85 | UAV+LiDAR |
| LZLF-25 | 103°31'31.424″ | 31°33'31.355″ | 37.40 | UAV | BXT-05 | 103°31'14.206″ | 31°33'21.988″ | 662.65 | LiDAR |
表2 基于光学和LiDAR解译滑坡要素信息
Table 2 Interpretation of landslide element information based on optics and LiDAR
| 编号 | 经度 | 纬度 | 解译长 度(m) | 数据源 | 编号 | 经度 | 纬度 | 解译长度 (m) | 数据源 |
|---|---|---|---|---|---|---|---|---|---|
| LZLF-01 | 103°31'28.301″ | 31°33'33.949″ | 79.27 | UAV | LZLF-26 | 103°31'30.166″ | 31°33'32.218″ | 25.70 | UAV |
| LZLF-02 | 103°31'26.699″ | 31°33'31.648″ | 39.34 | UAV | LZLF-27 | 103°31'28.409″ | 31°33'32.072″ | 36.55 | UAV |
| LZLF-03 | 103°31'25.592″ | 31°33'28.118″ | 227.31 | UAV+LiDAR | LZLF-28 | 103°31'34.203″ | 31°33'28.988″ | 53.58 | UAV+LiDAR |
| LZLF-04 | 103°31'11.317″ | 31°33'20.577″ | 27.49 | UAV | JQLF-01 | 103°31'25.179″ | 31°33'27.065″ | 127.84 | UAV+LiDAR |
| LZLF-05 | 103°31'8.443″ | 31°33'19.543″ | 92.64 | UAV | JQLF-02 | 103°31'28.827″ | 31°33'31.336″ | 56.33 | UAV |
| LZLF-06 | 103°31'5.144″ | 31°33'19.638″ | 35.76 | UAV | XCDK-01 | 103°31'19.210″ | 31°33'28.953″ | 28.58 | LiDAR |
| LZLF-07 | 103°31'32.275″ | 31°33'28.104″ | 44.73 | UAV+LiDAR | XCDK-02 | 103°31'20.946″ | 31°33'25.098″ | 24.73 | LiDAR |
| LZLF-08 | 103°31'28.615″ | 31°33'26.308″ | 196.80 | UAV+LiDAR | XCDK-03 | 103°31'35.606″ | 31°33'21.720″ | 289.47 | LiDAR |
| LZLF-09 | 103°31'24.484″ | 31°33'23.036″ | 124.34 | UAV+LiDAR | XCDK-04 | 103°31'14.622″ | 31°33'16.148″ | 228.15 | LiDAR |
| LZLF-10 | 103°31'32.964″ | 31°33'27.661″ | 35.58 | UAV+LiDAR | XCDK-05 | 103°31'35.675″ | 31°33'35.322″ | 57.48 | UAV+LiDAR |
| LZLF-11 | 103°31'29.147″ | 31°33'27.998″ | 76.07 | UAV | XCDK-06 | 103°31'33.409″ | 31°33'36.425″ | 67.98 | UAV+LiDAR |
| LZLF-12 | 103°31'31.702″ | 31°33'28.441″ | 21.60 | UAV | XCDK-07 | 103°31'29.022″ | 31°33'36.919″ | 122.35 | UAV+LiDAR |
| LZLF-13 | 103°31'32.860″ | 31°33'24.858″ | 15.61 | UAV | XCDK-08 | 103°31'24.127″ | 31°33'31.968″ | 130.96 | UAV+LiDAR |
| LZLF-14 | 103°31'32.701″ | 31°33'24.564″ | 19.57 | UAV | HPB-01 | 103°31'33.636″ | 31°33'16.551″ | 1822.41 | LiDAR |
| LZLF-15 | 103°31'32.643″ | 31°33'24.433″ | 15.08 | UAV | HPB-02 | 103°31'25.368″ | 31°33'8.839″ | 1730.82 | LiDAR |
| LZLF-16 | 103°31'32.864″ | 31°33'25.359″ | 15.53 | UAV | QYDJ-01 | 103°31'30.643″ | 31°33'41.233″ | 328.10 | UAV+LiDAR |
| LZLF-17 | 103°31'32.400″ | 31°33'25.121″ | 14.87 | UAV | QYDJ-02 | 103°31'1.323″ | 31°33'24.602″ | 162.49 | UAV+LiDAR |
| LZLF-18 | 103°31'31.671″ | 31°33'24.773″ | 12.85 | UAV | QYDJ-03 | 103°31'8.743″ | 31°33'32.113″ | 339.34 | UAV+LiDAR |
| LZLF-19 | 103°31'31.252″ | 31°33'24.641″ | 6.77 | UAV | QYDJ-04 | 103°31'15.904″ | 31°33'35.455″ | 100.43 | UAV+LiDAR |
| LZLF-20 | 103°31'30.880″ | 31°33'24.687″ | 10.20 | UAV | QYDJ-05 | 103°31'19.188″ | 31°33'39.955″ | 292.20 | UAV+LiDAR |
| LZLF-21 | 103°31'18.898″ | 31°33'14.474″ | 218.83 | UAV+LiDAR | BXT-01 | 103°31'17.773″ | 31°33'26.923″ | 446.04 | LiDAR |
| LZLF-22 | 103°31'17.895″ | 31°33'23.470″ | 77.46 | LiDAR | BXT-02 | 103°31'11.288″ | 31°33'20.288″ | 661.71 | LiDAR |
| LZLF-23 | 103°31'18.842″ | 31°33'23.375″ | 38.43 | LiDAR | BXT-03 | 103°31'33.172″ | 31°33'34.402″ | 796.72 | UAV+LiDAR |
| LZLF-24 | 103°31'31.153″ | 31°33'31.655″ | 26.14 | UAV | BXT-04 | 103°31'24.471″ | 31°33'27.910″ | 830.85 | UAV+LiDAR |
| LZLF-25 | 103°31'31.424″ | 31°33'31.355″ | 37.40 | UAV | BXT-05 | 103°31'14.206″ | 31°33'21.988″ | 662.65 | LiDAR |
| 解译要素 | 基于光学标 志解译数量 | 基于机载LiDAR 标志解译数量 | 两者共同 解译数量 | 总计 |
|---|---|---|---|---|
| 拉张裂缝 | 19 | 2 | 7 | 28 |
| 剪切裂缝 | 1 | 0 | 1 | 2 |
| 下挫陡坎 | 0 | 4 | 4 | 8 |
| 滑坡壁 | 0 | 2 | 0 | 2 |
| 前缘堆积 | 0 | 0 | 5 | 5 |
| 次级变形 | 0 | 3 | 2 | 5 |
表3 基于光学和LiDAR解译滑坡要素解译结果统计
Table 3 Statistics of the landslide element interpretation results based on optics and LiDAR
| 解译要素 | 基于光学标 志解译数量 | 基于机载LiDAR 标志解译数量 | 两者共同 解译数量 | 总计 |
|---|---|---|---|---|
| 拉张裂缝 | 19 | 2 | 7 | 28 |
| 剪切裂缝 | 1 | 0 | 1 | 2 |
| 下挫陡坎 | 0 | 4 | 4 | 8 |
| 滑坡壁 | 0 | 2 | 0 | 2 |
| 前缘堆积 | 0 | 0 | 5 | 5 |
| 次级变形 | 0 | 3 | 2 | 5 |
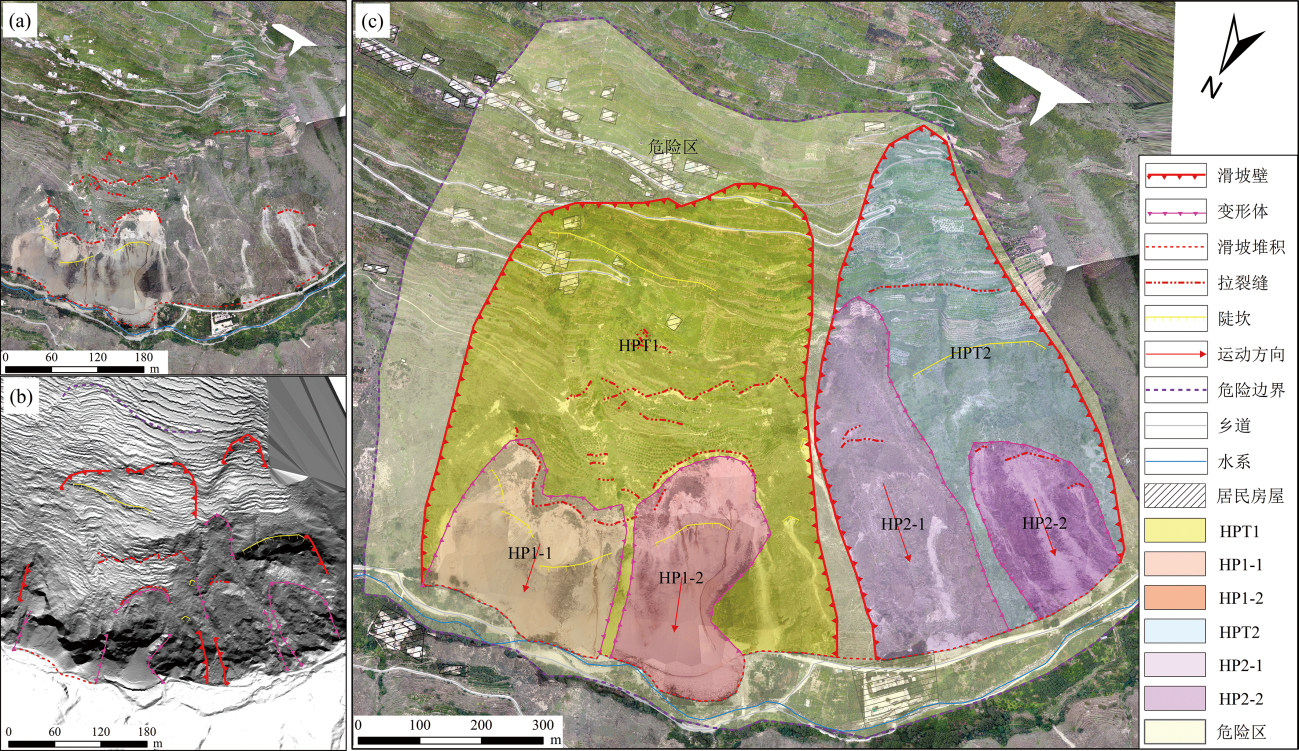
图6 无人机遥感滑坡综合解译图 (a) 无人机光学解译图;(b) 机载LiDAR-DEM解译图;(c) 滑坡要素组合分区解译图
Fig.6 Comprehensive interpretation map of the landslide using the drone remote sensing technique
| 一级滑体 | 二级变形体 | 经度 | 纬度 | 分区面积(m2) | 滑体面积(104 m2) | 推测厚度(m) | 估算体积(104 m3) |
|---|---|---|---|---|---|---|---|
| HPT1 | HP1-1 | 103°31'51.528″ | 31°33'40.624″ | 68336.04 | 29.08 | 4.55 | 132.31 |
| HP1-2 | 103°31'20.377″ | 31°33'53.573″ | 66054.13 | ||||
| HPT2 | HP2-1 | 103°31'09.236″ | 31°33'38.424″ | 95738.30 | 13.77 | 4.96 | 68.32 |
| HP2-2 | 103°31'07.096″ | 31°33'34.374″ | 44967.48 |
表4 滑坡体分区解译信息
Table 4 Interpretation information of the landslide mass zoning
| 一级滑体 | 二级变形体 | 经度 | 纬度 | 分区面积(m2) | 滑体面积(104 m2) | 推测厚度(m) | 估算体积(104 m3) |
|---|---|---|---|---|---|---|---|
| HPT1 | HP1-1 | 103°31'51.528″ | 31°33'40.624″ | 68336.04 | 29.08 | 4.55 | 132.31 |
| HP1-2 | 103°31'20.377″ | 31°33'53.573″ | 66054.13 | ||||
| HPT2 | HP2-1 | 103°31'09.236″ | 31°33'38.424″ | 95738.30 | 13.77 | 4.96 | 68.32 |
| HP2-2 | 103°31'07.096″ | 31°33'34.374″ | 44967.48 |
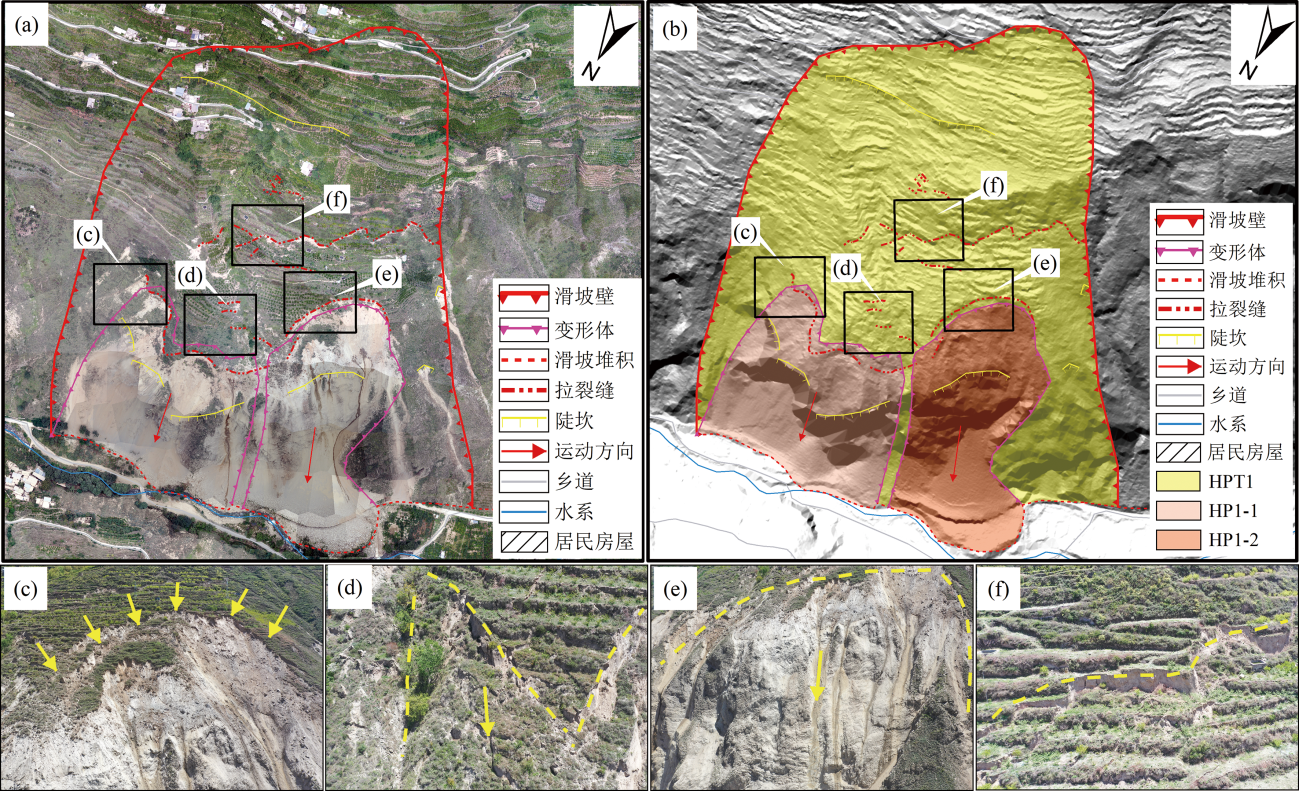
图7 滑体HPT1无人机遥感精细解译 (a) 无人机光学解译图;(b) 机载LiDAR-DEM解译图;(c) 后缘下挫;(d )剪切-拉裂缝;(e) 变形崩塌;(f) 横向拉张裂缝
Fig.7 Interpretation of remote sensing elements for the sliding HPT1 unmanned aerial vehicle

图8 滑体HPT2无人机遥感精细解译 (a) 无人机光学解译图;(b) 机载LiDAR-DEM解译图;(c) 拉张裂缝;(d) 次级滑塌;(e) 变形下挫
Fig.8 Interpretation of remote sensing elements for the sliding HPT2 unmanned aerial vehicle
| 识别要素 | 无人机光学影像 | LiDAR-DEM | ||||
|---|---|---|---|---|---|---|
| 影像色调 | 纹理结构 | 图谱特征 | 影像色调 | 纹理结构 | 图谱特征 | |
| 拉张裂缝 | 裂缝呈土黄色,周边地物呈浅绿至绿色 | 裂缝边缘(后壁边缘)纹理粗糙,周边地物纹理单一或渐变,两者界线清晰 | 呈弧形、不规则弯曲状 | 裂缝呈深灰至黑色,周边地物呈浅灰或灰白色 | 裂缝(陡坎)边缘纹理粗糙度不均一,与周边纹理相比表现为明显的阴影状 | 呈短弧状,与主滑方向呈垂直或锐角 |
| 剪切裂缝 | 呈半连续间断性长条状 | 呈短直线型,数条并列与主滑方向近似平行 | ||||
| 滑坡后壁 | 呈半圆弧形、弓形、伞状 | 后壁边缘(陡坎处、滑塌变形边界)呈灰黑色,周边呈浅灰色 | 呈半圆弧形、扇形 | |||
| 下挫台坎 | 不明显 | 不明显 | 不明显 | 呈具有明显高差特征的不规则条带状 | ||
| 新鲜滑塌 (次级变形) | 新鲜滑动处呈淡紫色,周边地物呈绿色 | 滑动边缘纹理粗糙,有颗粒感 | 滑动边缘呈半椭圆形,具圈闭状 | 变形边界纹理特征不明显 | 与周边地物高程相比,呈明显低洼负地形 | |
表5 不同影像数据上的滑坡要素影像色调、纹理结构与图谱特征
Table 5 Statistics of the landslide element image color, texture structure, and graph features on different imaging data
| 识别要素 | 无人机光学影像 | LiDAR-DEM | ||||
|---|---|---|---|---|---|---|
| 影像色调 | 纹理结构 | 图谱特征 | 影像色调 | 纹理结构 | 图谱特征 | |
| 拉张裂缝 | 裂缝呈土黄色,周边地物呈浅绿至绿色 | 裂缝边缘(后壁边缘)纹理粗糙,周边地物纹理单一或渐变,两者界线清晰 | 呈弧形、不规则弯曲状 | 裂缝呈深灰至黑色,周边地物呈浅灰或灰白色 | 裂缝(陡坎)边缘纹理粗糙度不均一,与周边纹理相比表现为明显的阴影状 | 呈短弧状,与主滑方向呈垂直或锐角 |
| 剪切裂缝 | 呈半连续间断性长条状 | 呈短直线型,数条并列与主滑方向近似平行 | ||||
| 滑坡后壁 | 呈半圆弧形、弓形、伞状 | 后壁边缘(陡坎处、滑塌变形边界)呈灰黑色,周边呈浅灰色 | 呈半圆弧形、扇形 | |||
| 下挫台坎 | 不明显 | 不明显 | 不明显 | 呈具有明显高差特征的不规则条带状 | ||
| 新鲜滑塌 (次级变形) | 新鲜滑动处呈淡紫色,周边地物呈绿色 | 滑动边缘纹理粗糙,有颗粒感 | 滑动边缘呈半椭圆形,具圈闭状 | 变形边界纹理特征不明显 | 与周边地物高程相比,呈明显低洼负地形 | |
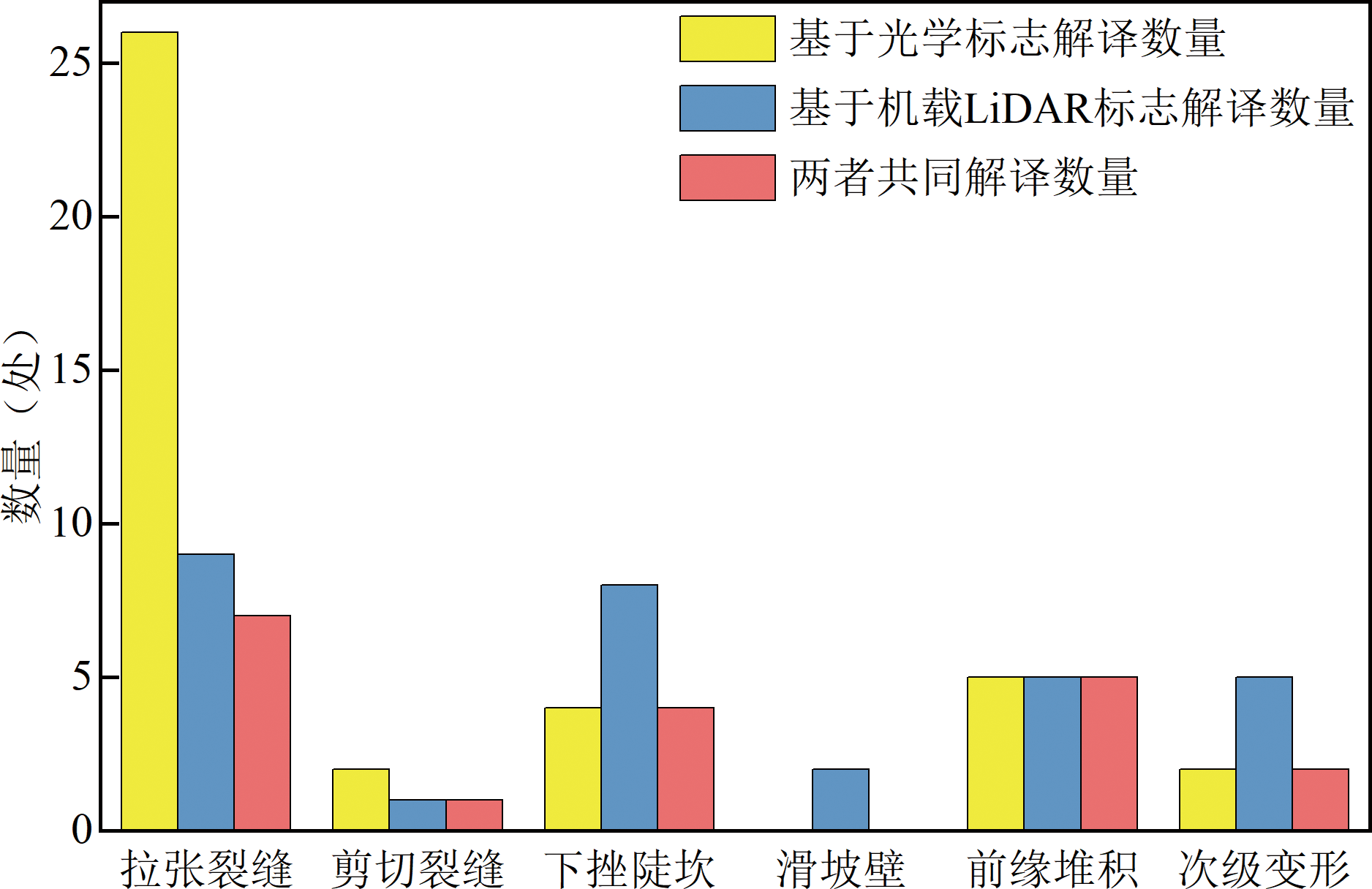
图9 不同类型要素在不同影像数据上的解译数量对比
Fig.9 Comparison of interpretation quantity of different types of elements on different imaging data

图10 代表性滑坡要素的无人机光学影像 (a1)(b1)(c1)(d1)和对应的LiDAR-DEM (a2)(b2)(c2)(d2)综合识别 (a1)(a2)光学影像无变形特征,LiDAR-DEM具下挫纹理,识别为次级变形;(b1)(b2)光学影像无变形特征,LiDAR-DEM具台坎纹理,识别为滑坡台坎;(c1)(c2)光学影像见横向线性纹理,LiDAR-DEM具深灰色阴影,识别为拉张裂缝;(d1)(d2)光学影像见下滑纹理,LiDAR-DEM具突变阴影,识别为新鲜滑塌
Fig.10 Comprehensive identification of representative landslide elements using the unmanned aerial vehicle optical images (a1) (b1) (c1) (d1) and corresponding LiDAR-DEM (a2) (b2) (c2) (d2)

图11 现场调查照片 (a) 滑坡全貌;(b) 坡体拉裂缝;(c) 多级下挫;(d) 农户院坝裂缝
Fig.11 Photos of the on-site investigation
| 编号 | 解译长度 (m) | 实测长度 (m) | 偏差 (m) | 编号 | 解译长度 (m) | 实测长度 (m) | 偏差 (m) | 编号 | 解译长度 (m) | 实测长度 (m) | 偏差 (m) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| LZLF-01 | 79.27 | 80.67 | 1.4 | LZLF-14 | 19.57 | 20.57 | 1.0 | LZLF-27 | 36.55 | 36.15 | -0.4 |
| LZLF-02 | 39.34 | 40.14 | 0.8 | LZLF-15 | 15.08 | 14.38 | -0.7 | LZLF-28 | 53.58 | 55.48 | 1.9 |
| LZLF-03 | 227.31 | 228.01 | 0.7 | LZLF-16 | 15.53 | 14.53 | -1.0 | JQLF-01 | 127.84 | 129.34 | 1.5 |
| LZLF-04 | 27.49 | 29.09 | 1.6 | LZLF-17 | 14.87 | 14.07 | -0.8 | JQLF-02 | 56.33 | 58.63 | 2.3 |
| LZLF-05 | 92.64 | 93.74 | 1.1 | LZLF-18 | 12.85 | 12.65 | -0.2 | XCDK-01 | 28.58 | 30.98 | 2.4 |
| LZLF-06 | 35.76 | 35.06 | -0.7 | LZLF-19 | 6.77 | 5.87 | -0.9 | XCDK-02 | 24.73 | 25.43 | 0.7 |
| LZLF-07 | 44.73 | 46.63 | 1.9 | LZLF-20 | 10.20 | 9.40 | -0.8 | XCDK-03 | 289.47 | 291.67 | 2.2 |
| LZLF-08 | 196.8 | 195.80 | -1.0 | LZLF-21 | 218.83 | 220.23 | 1.4 | XCDK-04 | 228.15 | 229.15 | 1.0 |
| LZLF-09 | 124.34 | 126.14 | 1.8 | LZLF-22 | 77.46 | 77.36 | -0.1 | XCDK-05 | 57.48 | 59.68 | 2.2 |
| LZLF-10 | 35.58 | 37.78 | 2.2 | LZLF-23 | 38.43 | 39.93 | 1.5 | XCDK-06 | 67.98 | 70.78 | 2.8 |
| LZLF-11 | 76.07 | 78.97 | 2.9 | LZLF-24 | 26.14 | 25.54 | -0.6 | XCDK-07 | 122.35 | 123.15 | 0.8 |
| LZLF-12 | 21.60 | 23.10 | 1.5 | LZLF-25 | 37.40 | 38.60 | 1.2 | XCDK-08 | 130.96 | 130.66 | -0.3 |
| LZLF-13 | 15.61 | 17.71 | 2.1 | LZLF-26 | 25.70 | 26.30 | 0.6 |
表6 实地量测与室内解译差异统计
Table 6 Statistics of differences between the on-site measurement and indoor interpretation
| 编号 | 解译长度 (m) | 实测长度 (m) | 偏差 (m) | 编号 | 解译长度 (m) | 实测长度 (m) | 偏差 (m) | 编号 | 解译长度 (m) | 实测长度 (m) | 偏差 (m) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| LZLF-01 | 79.27 | 80.67 | 1.4 | LZLF-14 | 19.57 | 20.57 | 1.0 | LZLF-27 | 36.55 | 36.15 | -0.4 |
| LZLF-02 | 39.34 | 40.14 | 0.8 | LZLF-15 | 15.08 | 14.38 | -0.7 | LZLF-28 | 53.58 | 55.48 | 1.9 |
| LZLF-03 | 227.31 | 228.01 | 0.7 | LZLF-16 | 15.53 | 14.53 | -1.0 | JQLF-01 | 127.84 | 129.34 | 1.5 |
| LZLF-04 | 27.49 | 29.09 | 1.6 | LZLF-17 | 14.87 | 14.07 | -0.8 | JQLF-02 | 56.33 | 58.63 | 2.3 |
| LZLF-05 | 92.64 | 93.74 | 1.1 | LZLF-18 | 12.85 | 12.65 | -0.2 | XCDK-01 | 28.58 | 30.98 | 2.4 |
| LZLF-06 | 35.76 | 35.06 | -0.7 | LZLF-19 | 6.77 | 5.87 | -0.9 | XCDK-02 | 24.73 | 25.43 | 0.7 |
| LZLF-07 | 44.73 | 46.63 | 1.9 | LZLF-20 | 10.20 | 9.40 | -0.8 | XCDK-03 | 289.47 | 291.67 | 2.2 |
| LZLF-08 | 196.8 | 195.80 | -1.0 | LZLF-21 | 218.83 | 220.23 | 1.4 | XCDK-04 | 228.15 | 229.15 | 1.0 |
| LZLF-09 | 124.34 | 126.14 | 1.8 | LZLF-22 | 77.46 | 77.36 | -0.1 | XCDK-05 | 57.48 | 59.68 | 2.2 |
| LZLF-10 | 35.58 | 37.78 | 2.2 | LZLF-23 | 38.43 | 39.93 | 1.5 | XCDK-06 | 67.98 | 70.78 | 2.8 |
| LZLF-11 | 76.07 | 78.97 | 2.9 | LZLF-24 | 26.14 | 25.54 | -0.6 | XCDK-07 | 122.35 | 123.15 | 0.8 |
| LZLF-12 | 21.60 | 23.10 | 1.5 | LZLF-25 | 37.40 | 38.60 | 1.2 | XCDK-08 | 130.96 | 130.66 | -0.3 |
| LZLF-13 | 15.61 | 17.71 | 2.1 | LZLF-26 | 25.70 | 26.30 | 0.6 |
| [1] | 自然资源部关于印发《全国地质灾害防治“十四五”规划》的通知[EB/OL]. [2022-12-7]. http://gi.mnr.gov.cn/202301/t20230103_2772003.html/P020230103616129966789.doc. |
| [2] | 李德仁, 李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报(信息科学版), 2014, 39(5): 505-513, 540. |
| [3] | 董秀军, 邓博, 袁飞云, 等. 航空遥感在地质灾害领域的应用:现状与展望[J]. 武汉大学学报(信息科学版), 2023, 48(12): 1897-1913. |
| [4] |
许强, 郭晨, 董秀军. 地质灾害航空遥感技术应用现状及展望[J]. 测绘学报, 2022, 51(10): 2020-2033.
DOI |
| [5] | 范宣梅, 王欣, 戴岚欣, 等. 2022年Ms 6.8级泸定地震诱发地质灾害特征与空间分布规律研究[J]. 工程地质学报, 2022, 30(5): 1504-1516. |
| [6] | 郭晨, 许强, 董秀军, 等. 复杂山区地质灾害机载激光雷达识别研究[J]. 武汉大学学报(信息科学版), 2021, 46(10): 1538-1547. |
| [7] | 许强, 董秀军, 李为乐. 基于天-空-地一体化的重大地质灾害隐患早期识别与监测预警[J]. 武汉大学学报(信息科学版), 2019, 44(7): 957-966. |
| [8] | 陈昌富, 何旷宇, 余加勇, 等. 基于无人机贴近摄影的高陡边坡结构面识别[J]. 湖南大学学报(自然科学版), 2022, 49(1): 145-154. |
| [9] | 李元灵, 刘建康, 张佳佳, 等. 藏东察达高位崩塌发育特征及潜在危险[J]. 现代地质, 2021, 35(1): 74-82. |
| [10] | 彭大雷, 许强, 董秀军, 等. 基于高精度低空摄影测量的黄土滑坡精细测绘[J]. 工程地质学报, 2017, 25(2): 424-435. |
| [11] | 周洪福, 冉涛, 陈波, 等. 川西顺层斜坡破坏模式及层间弱面连通率对斜坡稳定性的影响[J]. 现代地质, 2021, 35(1): 137-144. |
| [12] | 孔嘉旭, 谷天峰, 孙萍萍, 等. 基于多期无人机影像的黑方台硅化厂滑坡形态变形演化研究[J]. 干旱区资源与环境, 2021, 35(1): 100-107. |
| [13] | 丁要轩, 龚文平, 程展, 等. 基于多期无人机影像的滑坡地表竖向变形测量模型试验与工程应用[J]. 地质科技通报, 2023, 42(2): 267-278. |
| [14] | 王浩杰, 孙萍, 韩帅, 等. 甘肃通渭 “9·14” 常河滑坡成因机理[J]. 现代地质, 2021, 35(3): 732-743. |
| [15] | 佘金星, 许强, 杨武年, 等. 九寨沟地震地质灾害隐患早期识别与分析研究[J]. 工程地质学报, 2023, 31(1): 207-216. |
| [16] | 王绚, 范宣梅, 杨帆, 等. 植被茂密山区地质灾害遥感解译方法研究[J]. 武汉大学学报(信息科学版), 2020, 45(11): 1771-1781. |
| [17] | LI X, CHENG X, CHEN W, et al. Identification of forested landslides using LiDAR data, object-based image analysis, and machine learning algorithms[J]. Remote Sensing, 2015, 7(8): 9705-9726. |
| [18] | ROSSI G, TANTERI L, TOFANI V, et al. Multitemporal UAV surveys for landslide mapping and characterization[J]. Landslides, 2018, 15(5): 1045-1052. |
| [19] | GÖRÜM T. Landslide recognition and mapping in a mixed forest environment from airborne LiDAR data[J]. Engineering Geology, 2019, 258: 105155. |
| [20] | PELLICANI R, ARGENTIERO I, MANZARI P, et al. UAV and airborne LiDAR data for interpreting kinematic evolution of landslide movements: The case study of the montescaglioso landslide (southern Italy)[J]. Geosciences, 2019, 9(6): 248. |
| [21] | KARANTANELLIS E, MARINOS V, VASSILAKIS E, et al. Object-based analysis using unmanned aerial vehicles (UAVs) for site-specific landslide assessment[J]. Remote Sensing, 2020, 12(11): 1711. |
| [22] | HAN L, DUAN P, LIU J J, et al. Research on landslide trace recognition by fusing UAV-based LiDAR DEM multi-feature information[J]. Remote Sensing, 2023, 15(19): 4755. |
| [23] | 殷跃平, 潘桂棠, 刘宇平, 等. 汶川地震地质与滑坡灾害概论[M]. 北京: 地质出版社, 2009: 70-72. |
| [24] | 张永双, 石菊松, 孙萍, 等. 汶川地震内外动力耦合及灾害实例[J]. 地质力学学报, 2009, 15(2): 131-141. |
| [25] | 李勇, 黄润秋, 周荣军, 等. 龙门山地震带的地质背景与汶川地震的地表破裂[J]. 工程地质学报, 2009, 17(1): 3-18. |
| [26] | 易桂喜, 周龙泉, 张浪平, 等. 四川盆地内部少震与弱震区Ms≥4.5地震预测意义分析[J]. 地震研究, 2020, 43(2): 262-269. |
| [27] |
刘小梅, 吴晶, 梁春涛, 等. 龙门山断裂带最新地震活动特征及其意义[J]. 地球物理学报, 2019, 62(4): 1312-1322.
DOI |
| [28] | 朱进, 丁亚洲, 陈攀杰, 等. 控制点布设对无人机影像空三精度的影响[J]. 测绘科学, 2016, 41(5): 116-120. |
| [1] | 曾帅, 马志刚, 赵聪, 杨磊, 张肃, 董继红, 梁京涛, 鄢圣武. 青藏高原东部大渡河流域太平桥乡古滑坡群复活特征多源遥感识别[J]. 现代地质, 2023, 37(04): 994-1003. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||